Acoustic Measurement
單元大綱
-
-
Figure 1. Outline drawing of Acoustic Bathymetry
水深:depth 伝搬時間:propagation time 音速:speed of sound
The speed of sound in seawater varies with water temperature, salinity, and depth (pressure), but is approximately 1,500 m/sec. If the propagation time is 2 seconds, the water depth is calculated as follows.
Depth = 2.0 sec x 1,500 m/sec ÷ 2
= 1,500 m
-
-
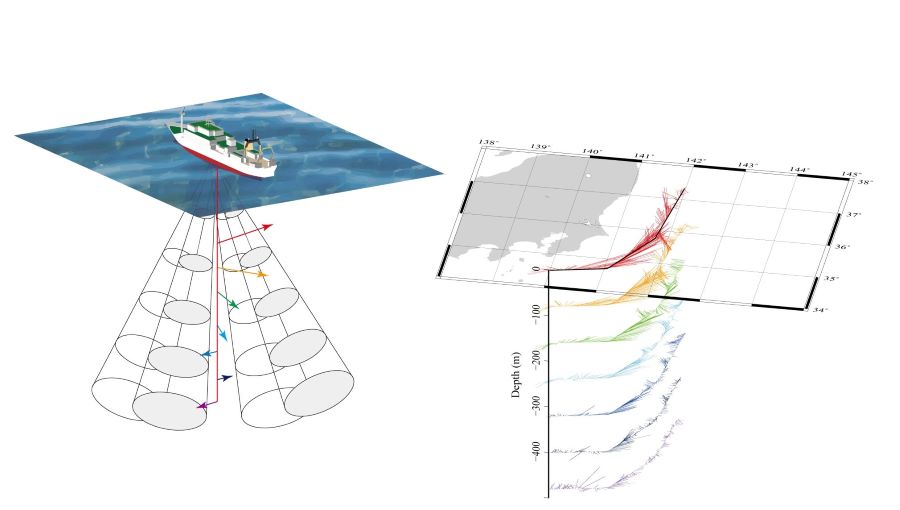
Figure 2 Tidal current vector diagram obtained by ADCP's sailing observation
-
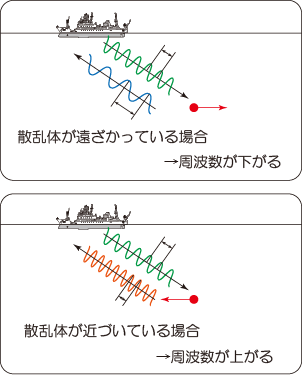
Figure 3 Outline drawing of Doppler shift
When the scatterer is moving away → frequency drops
When the scatterer is approaching → frequency goes up
-
-
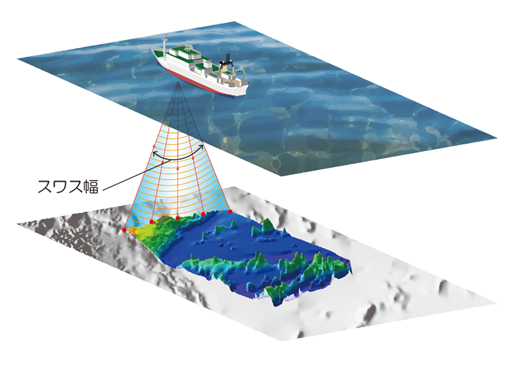
Figure 4 Bathymetry of Multi-narrow beam echo-sounder
スワス幅: Swath width
-
Fig. 6 Repeated bathymetric mapping and research voyages
-
-
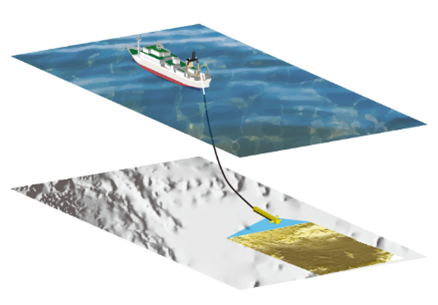
Figure 7 Towed side scanning sonar observation chart
-
-
Figure 8 Sub-bottom profiler - outline drawing
-
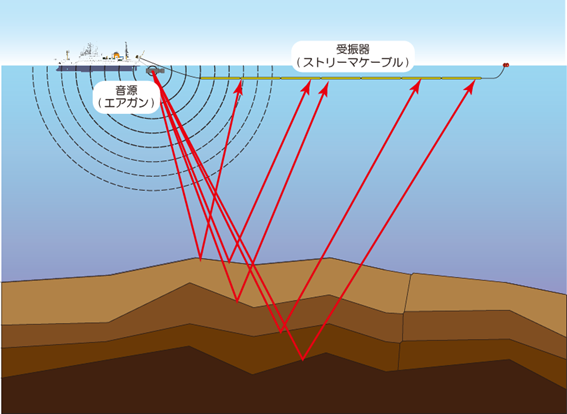
Figure 9 Refraction seismic survey Observation diagram
音源(エアガン): Sound Source (Airgun)
受振器(ストリーマケーブル) : Receiver (streamer cable)
-
-
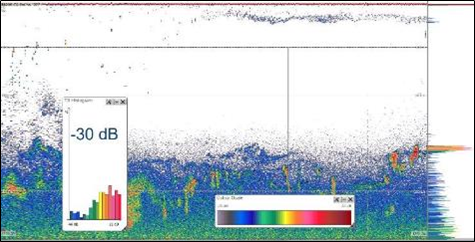
Figure 10 Echogram of a quantitative echo sounder
-
-
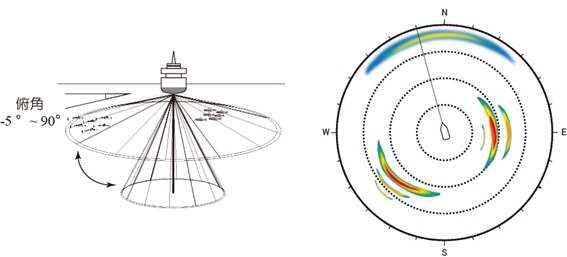
Figure 11 Scanning sonar detection range and echo display
俯角: depression
-
-
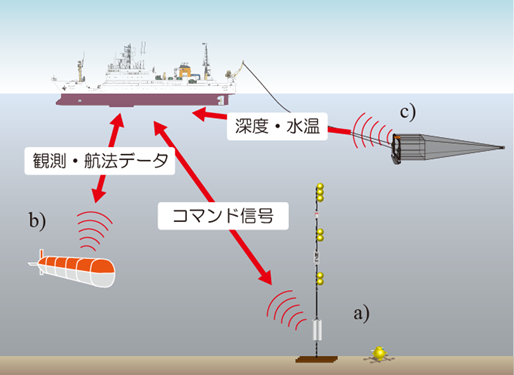
Figure12 Usage example of underwater acoustic communication
a) Underwater moored observation equipment b) Autonomous unmanned submersible c) Fishing gear shape measuring device
観測・航法データ: Observation and navigation data
コマンド信号: Command Signal
深度・水温: Depth and temperature
-
-
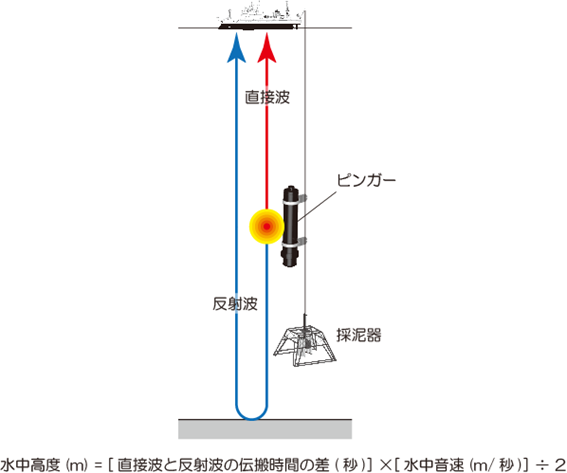
Figure 13 Conceptual diagram of underwater altitude measurement using a pinger
反射波: Reflected wave
直接波: Direct wave
ピンガー: Pinger
採泥器: Mud sampler
Underwater altitude (m) = [Difference in propagation time between direct wave and reflected wave (sec)] × [Underwater sound speed (m/sec)] / 2