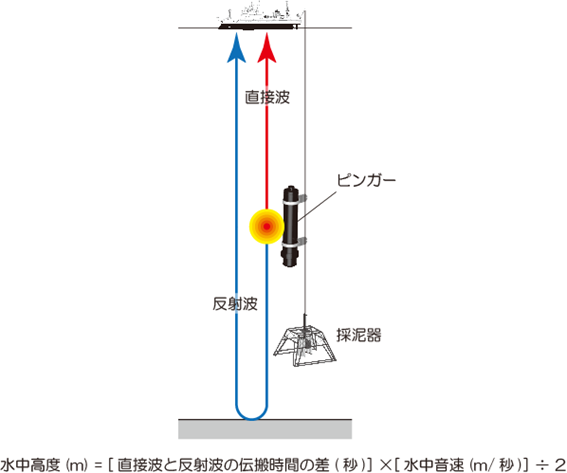
When collecting sediments with a mud sampler, or when making observations from the water surface to just above the seafloor with a CTD sampling system, etc., it is necessary to know the distance between the seafloor and the instrument (underwater altitude) in order to safely lower the instrument to the vicinity of the seafloor. To do this, an acoustic device (pinger) that emits sound waves at regular intervals underwater is used. The pinger is attached to the instrument or to a wire rope from which the instrument is suspended and lowered together with the instrument. The pinger is attached to the instrument or to a wire rope from which the instrument is suspended and lowered together with the one. The signal (direct wave) emitted by the pinger propagates through the seawater and is received by a transducer on the bottom of the ship. The reflected signal (reflected wave) is received after hitting the seafloor a little later. The difference in the arrival times of these two signals provides the distance between the instrument and the seafloor. The device also sends out pulse signals (pings) at precise time intervals (e.g., once per second), enabling continuous reception and real-time determination of the distance between the instrument and the seafloor (Figure 13).