Underwater Observation using Sound Waves ~Looking into the Sea with Sound~
섹션 개요
-
-



Fish in the ocean often migrate in schools of the same species. We need to know where and what species and sizes of fish are swimming. If we know these, we will be able to fish more efficiently and manage resources better. If we can accurately detect fish schools using ultrasonic waves, we can avoid excessive fishing. I would like to contribute to the SDGs by protecting the abundance of ocean and making it possible to supply food sustainably.
The United Nations has designated the decade starting in 2021 as the "Decade of Ocean Science," with the aim of contributing to SDGs. Ocean science, as defined by the UN, includes the field of fisheries.
-
-
One of the major differences between underwater and land observations is that the spatial information of depth must be considered in underwater observations. For example, in investigating the distribution of species in the ocean, organisms that inhabit the ocean are entirely different depending on depth, even if they are located horizontally in the same location. In other words, underwater observation is the observation of a huge three-dimensional space in the ocean. Furthermore, the direct observation of a location in the ocean is complicated due to problems such as the limited distance light can reach in the ocean and water pressure. Therefore, efficient underwater observation requires a tool that remotely enables a wide range of observations.
Sound waves are transmitted through liquids and solids better than radio and light waves. Therefore, sound waves are used as a superior tool for wide-range observations. In our laboratory, we are working on sound waves in underwater observation, particularly with the main theme of estimating marine living resources. Our research aims to accurately estimate the number of resources of various organisms, ranging from fish to zooplankton, that sound waves can observe.
By looking into the sea with sound waves, you can see many things that were not known or seen before. Here, we introduce the observation equipment that uses sound waves and the methods of estimating the amount of resources of marine organisms.
-
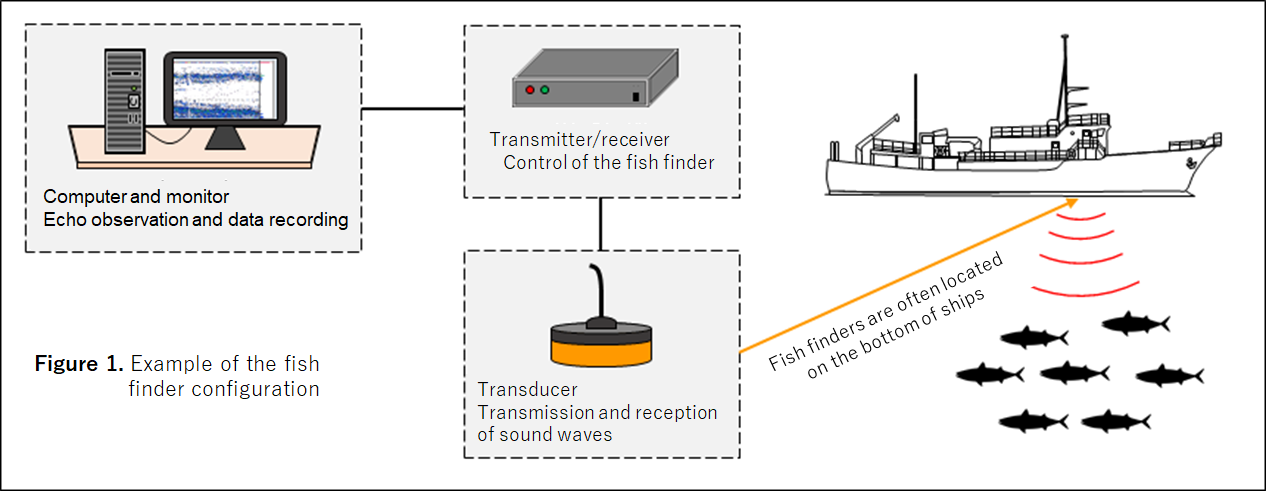
Echo sounders are the most popular equipment that uses sound waves and are often used in fisheries and recreational fishing. An echo sounder explores the sea by utilizing the property of sound waves that “reflect when they hit an object .” The echo sounder comprises a transmitter/receiver, a control unit, and a transducer that functions as both a microphone and speaker (Figure 1).
Principle (pulse‐echo technique)
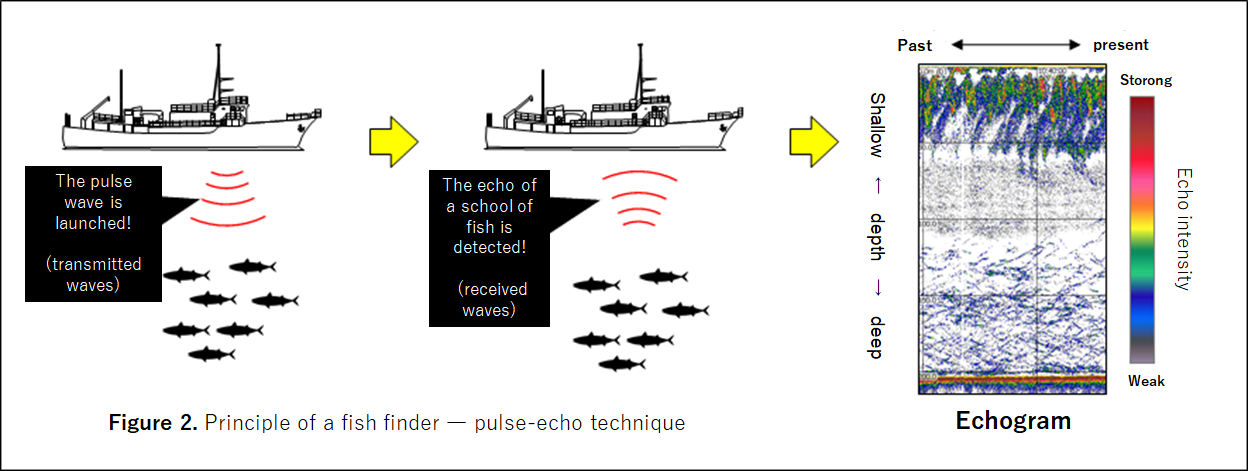
An echo sounder is a device that detects an object located directly under a ship by the pulse‐echo technique. As shown in Figure 2, a transducer attached to the ship's bottom first transmits sound waves directly under the ship (wave transmission). This is a short sound wave of approximately 1/1000 second, called a pulse wave (a sound like a hand-clapping). After hitting an object in the sea, a part of the transmitted sound wave is reflected, and returns to the original path called an echo. The object located directly under the ship can be observed by detecting (receiving) this echo with the transducer, and this is the same principle as the so-called “Yamabiko”. If the time from the transmission of the sound wave to the echo's return is measured, its product with the speed of sound (sound velocity) is the distance between the transducer and the object that the sound wave reciprocates (distance = velocity x time). In addition, because the strength of reflecting sound waves differs depending on the properties of the object they hit (number, size, and constituent substances), the strength of the echo can also be used to identify the object. The distance and strength of the echo are expressed in the echogram, which allows visual observation of the number of organisms in the ocean and the depth they are located.
The sound waves generally used in fish finders are ultrasonic waves with a high frequency (20 kHz or higher) that cannot be heard by the human ear. Because the echo intensity varies even for the same object depending on the frequency, the types of organisms in the ocean can be estimated based on the difference in the appearance on the echogram by using various frequencies at the same time.
Since echoes return not only from organisms but also from the seabed, the water depth under the ship can be measured. Therefore, fish finders are also used as depth sounders.
Quantitative echo sounder ~high-performance fish finder for scientists!~
It is intuitively thought that there are many fish when a strong echo is obtained. In other words, the strength and weakness of this echo can be considered as a clue for estimating the number of fish in the ocean. The fish finders used by researchers can quantitatively express the strength of this echo (the strength can be expressed numerically) and are called “quantitative” echo sounders. Therefore, the number of marine organism resources can be efficiently estimated using a quantitative echo sounder.
Estimating the number of resources with a quantitative echo sounder
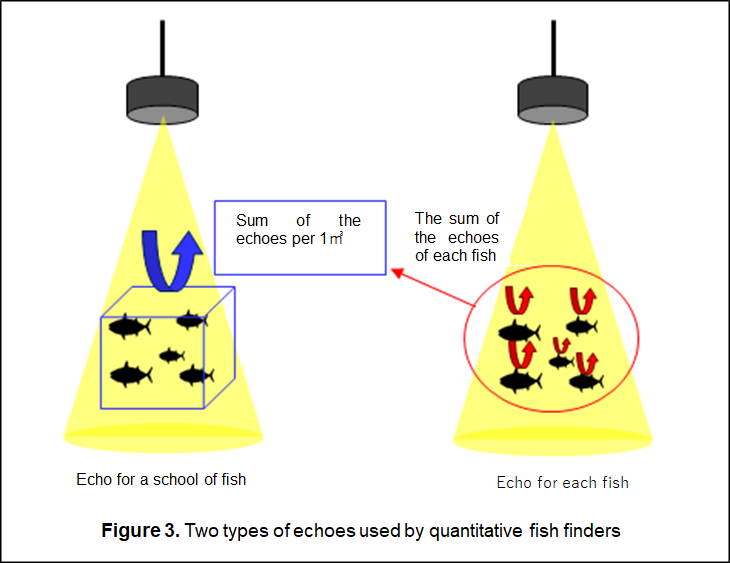
A quantitative echo sounder expresses the echo intensity by the volume backscattering strength (SV) value. The SV is the sum of all echoes bounced off an object within the range with a volume of 1 m3. For example, two fish per 1 m3 are indicated by the echo strength of two fish, and five fish per 1 m3 are indicated by the echo strength of five fish (Figure 3).
In such a situation, what if the average echo strength per fish is known? Assuming that the SV represents the echo strength for a certain number of fish, if we divide it by the strength of the echo per fish…
the echo strength per cubic meters / the echo strength per fish = n
Yes, this answer n represents how many fish per 1 m3 (the resource density (fish/m3)). Multiplying this density by the surveyed volume gives the number of fish in the entire surveyed area, and this is the concept of estimation of the amount of resources using a quantitative echo sounder. The echo strength per fish mentioned earlier is called the target strength (TS), and its value is very important for estimating the amount of resources using a quantitative echo sounder. Therefore, investigating the TS for each species is also one of the main subjects in this research field.
-
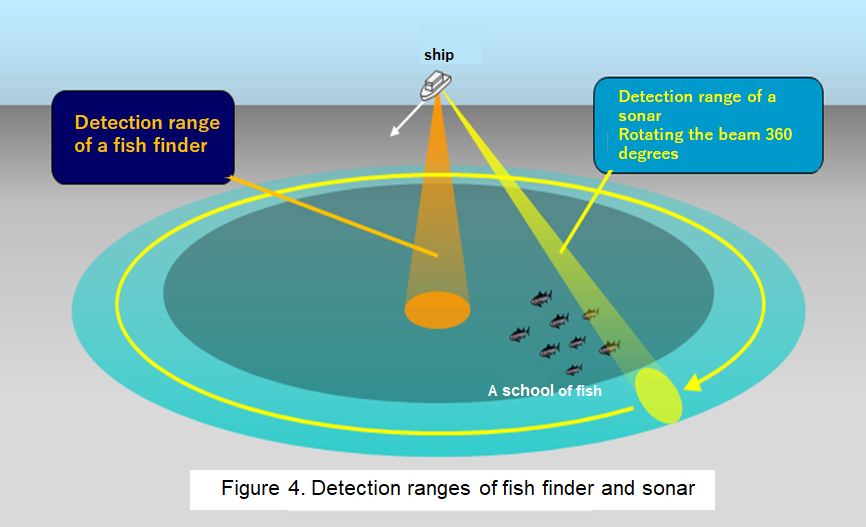
Since a sound wave spreads as it goes farther, it can search for a wider range as the distance increases. In contrast, the search range is narrow when the distance is short. Therefore, in the observations with a fish finder, the search range is narrow at a shallow depth (surface layer), and a school of fish cannot be observed at a depth shallower than the bottom of the ship. Sardines, mackerels, and saury, which can be found in supermarkets, are mainly distributed in the surface layer, for which fish finders are suitable. Therefore, sonar is used to find such fish efficiently.
Sonar is a device that detects fish echoes like a fish finder, but it can transmit sound waves in a horizontal direction (Figure 4). Moreover, because the sound waves can be transmitted all around the ship, it can search a wider range than a fish finder. If a school of fish is captured by a sonar continuously, its movement can be visualized three-dimensionally. The figure shows an example of a certain angle of depression (angle looking down), which be changed to correspond to various schools of fish.
Because saury catches have been poor in recent years, the survey of its abundance is important. Since sonars are more suitable for searching for saury than fish finders, the estimation of amount of saury resources using sonars has attracted attention.