
Set Net Design Using the Simulation of a School of Fish
Section outline
-
-


Developing the selectivity catch method for set-net will help conserve marine resources. Through this study, I hope to contribute to the SDG 14 (LIFE BELOW WATER).
The United Nations has designated the decade starting in 2021 as the "Decade of Ocean Science," with the aim of contributing to the SDGs. Ocean science, as defined by the UN, includes the field of fisheries.
-
-
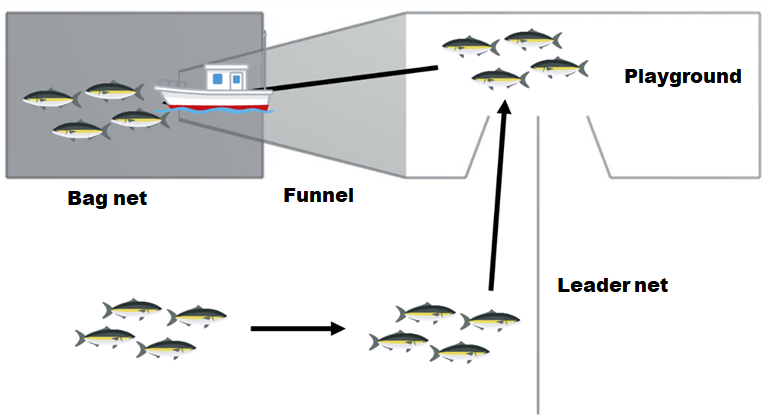
Then, it is caught when entering the bag net along the funnel.
Set net fishing is a passive fishery that installs large fishing gear over several kilometers in the sea and waits for a school of fish to enter the net.
In Japan, it accounts for the third-largest yield by the type of fishery.
A school of fish first encounters the leader net and enters the playground along the leader net.
-
Because set nets are installed relatively close to harbors, fishing boats used in set net fishing consume less fuel than fisheries that target schools of fish (for example, trawling and purse seining).
In addition, set net fishing is considered as a resource-friendly fishery as it does not catch all the fish in the area.
On the other hand, set net fishing cannot catch certain fish because it is a passive fishery.
Although bycatch of small Pacific bluefin tuna by set net fishing has recently become a problem in Hokkaido, it is presently difficult to intentionally prevent it.
In response to these problems, our research group thought, “Can we control the catch by devising the shape of the set net?”
However, because it is difficult to test set nets in the actual sea due to their large size, we have been working on a simulation approach.
-
The simulation uses the Boid model (Reynolds, 1987) to reproduce the behaviors of a school of fish.
The Boid model was developed to reproduce the behaviors of a flock of birds and has also been applied to the behaviors of fish.
By applying this to a 3D model of set nets, we demonstrated on the computer how fish are caught and at what rate they enter and escape from the bag net.
-
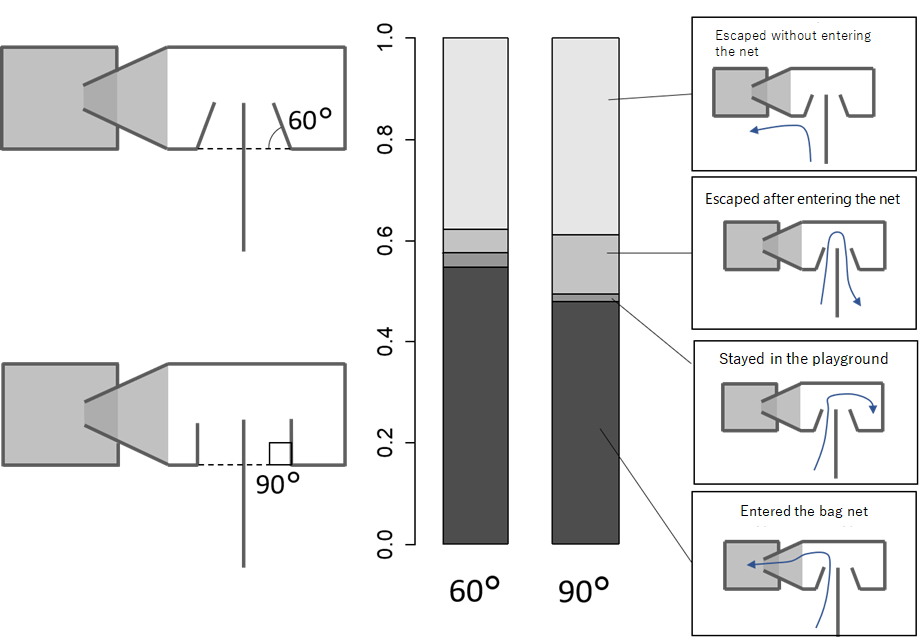
The following shows the catch and escape ratios for the above simulation repeated 500 times.
Here, the net angles of the entrance were set to 60° or 90°, and simulations were performed for each.
The result showed that the rate of entering the playground and escaping was higher with a net angle of 90°.
As a result, the amount of fish entering the bag net was larger with the net angle of 60°.
We believe that set nets can be designed to selectively catch target fishes (such as mackerel, horse mackerel, and tuna) by using a model to reproduce the actual difference in their behaviors.
-
Yuki Takahashi, Kazuyoshi KomeyamaFisheries Science September 2020


