
音響計測
Section outline
-
-
図1 音響測深の概念図
海水中の音速は、水温・塩分・深度(圧力)によって変わりますが、おおよそ1,500m/秒です。伝搬時間が2秒の場合、水深は
水深 = 2.0秒×1,500 m/秒÷2
= 1,500 m
と算出されます。
-
-
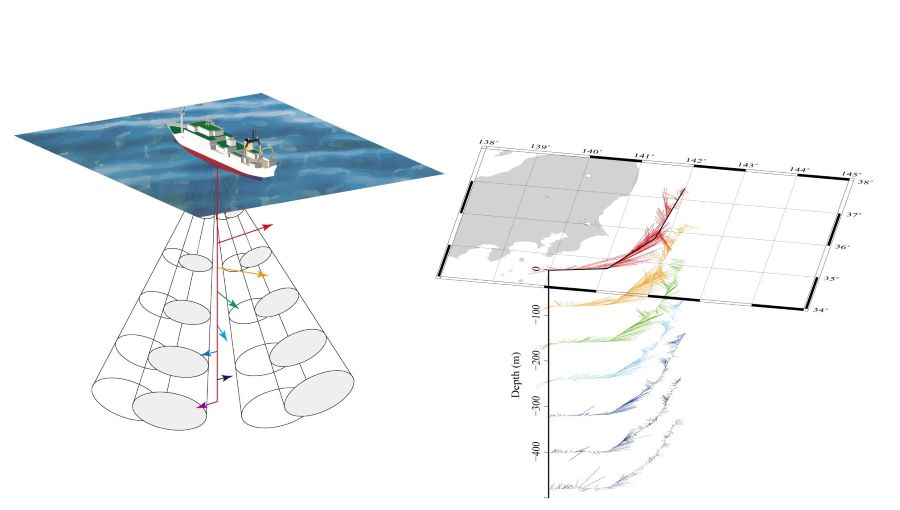
図2 ADCPの航走観測によって得られる潮流ベクトル図
-
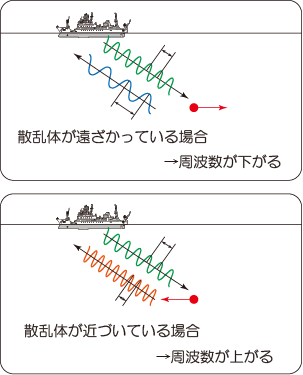
図3 ドップラーシフトの概念図
-
-
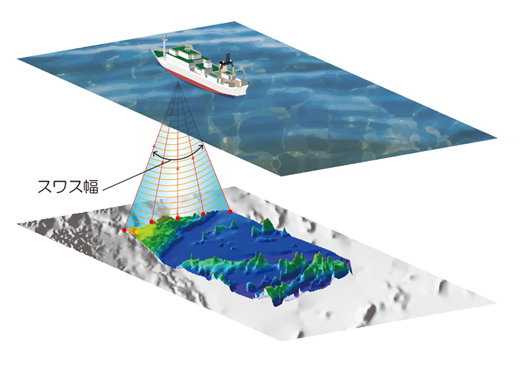
図4 マルチナロービーム音響測深機の測深イメージ
-
図6 海底地形図の作成と調査航海の繰り返し
-
-
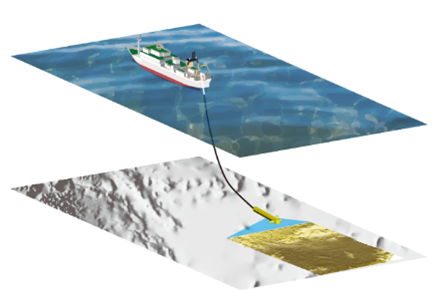
図7 曳航式サイドスキャンソナー観測図
-
-
図8 サブボトムプロファイラ― 概念図
-
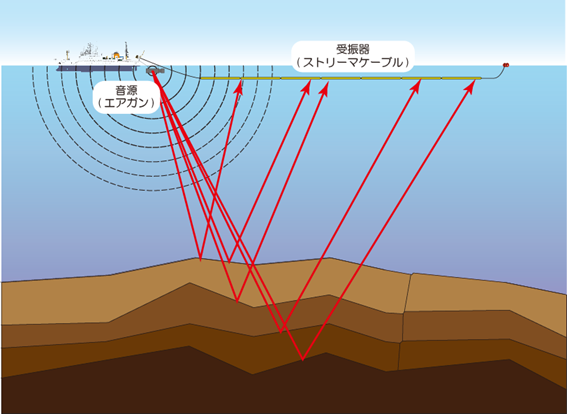
図9 反射法地震探査システム 観測図
-
-
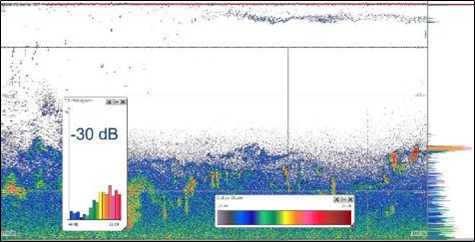
図10 計量魚群探知機のエコーグラム
-
-
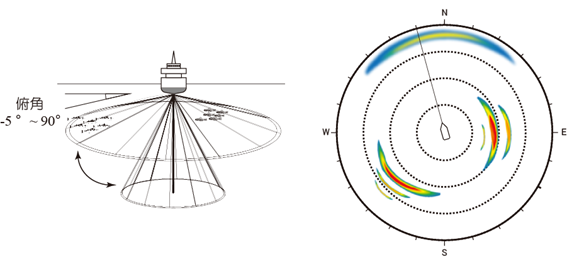
図11 スキャニングソナーの探知範囲とエコー表示
-
-
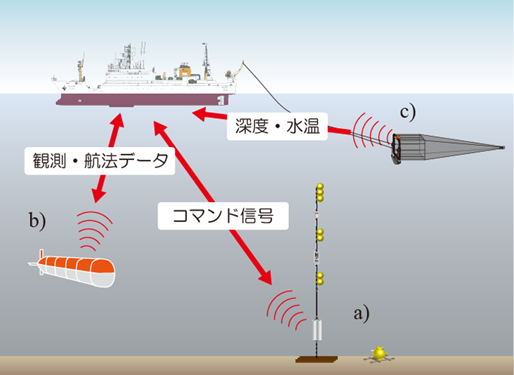
図12 水中音響通信の利用例
a)海中係留式観測装置 b) 自律型無人潜水艇 c) 漁具形状測定装置
-
-
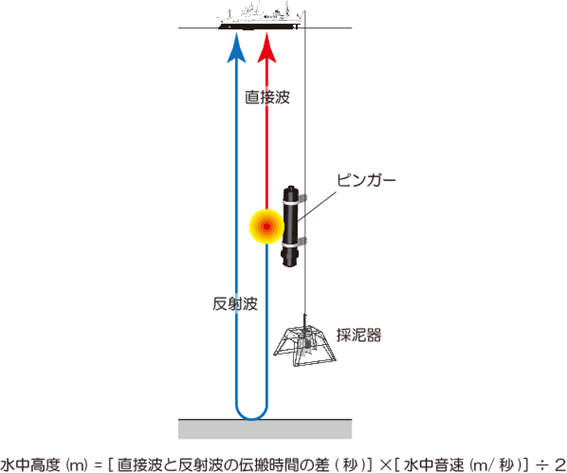
図13 ピンガーによる水中高度計測の概念図



