MOHTは船を前進させることで水中を移動させる「水平曳き」あるいは「傾斜曳き」という方法で曳網します(リンク:曳網方法)。水中を移動させるスピードを速くしても浮き上がることなく安定した深度で曳網できるのがMOHTの特徴です。
MOHTの曳網作業の概要を以下に順を追って解説します。
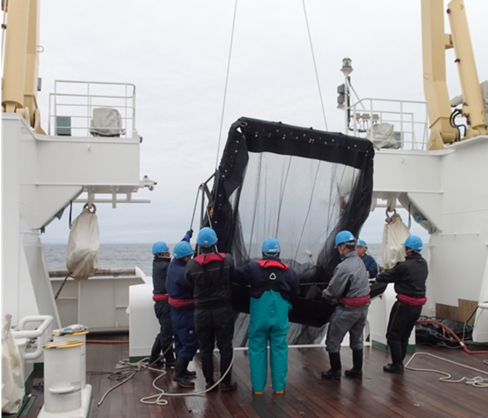
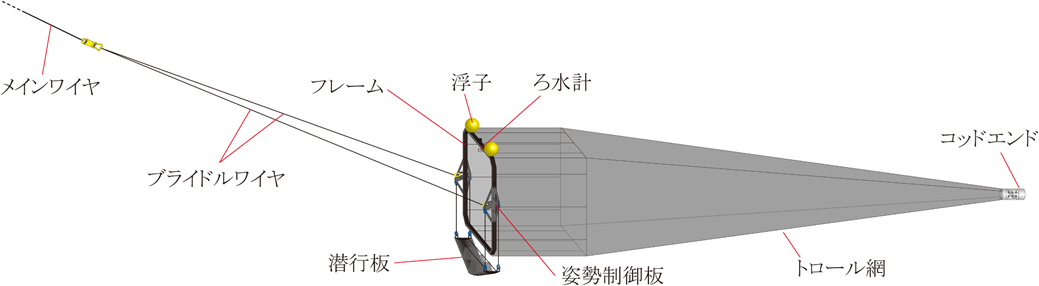
1)船尾のクレーンを用いてフレームを甲板から吊り上げた後、MOHT最後尾であるコッドエンド部を海中に投下します。次に、船を前進させながらメインワイヤを繰り出してフレーム部分まで海中へと投入します。
2)メインワイヤを繰り出して目標深度まで網を沈めていきます。網が目標深度に到達したらメインワイヤの繰り出しを停止します。希望の速さまで船速を上げていき、任意の時間または距離を曳網します。
3)曳網が終了したらメインワイヤを巻上げてMOHTを水面まで引き上げます。巻上速度を落とし、徐々に船に近づけていきます。
4)フレームが船のすぐ後ろまで来たら船尾のクレーンでフレームを持ち上げて甲板上へ揚収します。MOHTの網は長いため、フレームを甲板上に揚収した時点では網の後部はまだ水中にあります。長い網を手繰り、コッドエンドを海中から持ち上げます。この時、MOHTを揚収する作業と同時に網の外側からホースで海水を流しかけます。これは、コッドエンドまで届かずに網の途中で引っかかっている、あるいは網の目に詰まってしまった試料を流してコッドエンドに集めるためです。この作業は試料採取の定量性を高めるだけではなく、次回曳網時の試料への混入あるいは網の目詰まりによる採集効率の低下を防ぎます。
5)コッドエンドに取り付けられたバケットまで揚収出来たら、バケット内の採集物を別の容器に移し替えて調査・研究試料とします。また、ろ水計の回転数を読み取って濾し採った海水の量を見積もります。
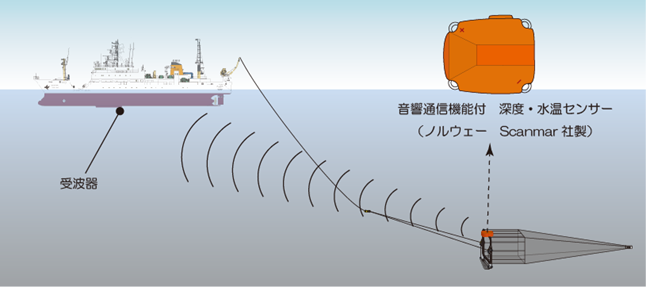
MOHTの深度安定性が優れているとはいえ、繰り出したワイヤロープが水中で受ける抵抗やワイヤロープの自重、網の目詰まりなどの影響によって、網の深度が曳網中に変化することもあります。メインワイヤの
傾角度から網深度を求めるか、あるいは音響通信機能付きの深度センサ(図
4: 漁具形状測定装置)を使って網深度を監視し、目的の深さから離れてしまった場合にはメインワイヤの長さを調整します。漁具形状測定装置と
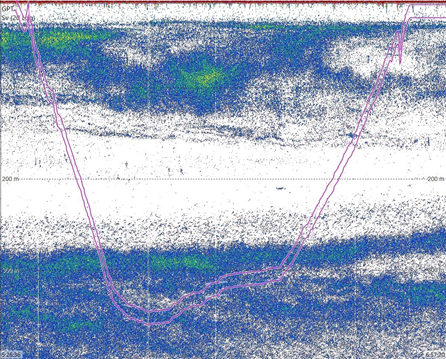
計量魚群探知機を組み合わせたシステムを用いれば、図
5に示したようにエコーグラム上で生物群集の位置と網の深度を照らし合わせながら曳網することができます。