MOHT uses a method called "horizontal towing" or "slant towing" in which the ship is moved forward through the water (link: Towing Methods). The MOHT is characterized by its ability to tow at a stable depth without floating, even when the speed at which it moves through the water is increased.
The following is a step-by-step overview of MOHT's towing operations.
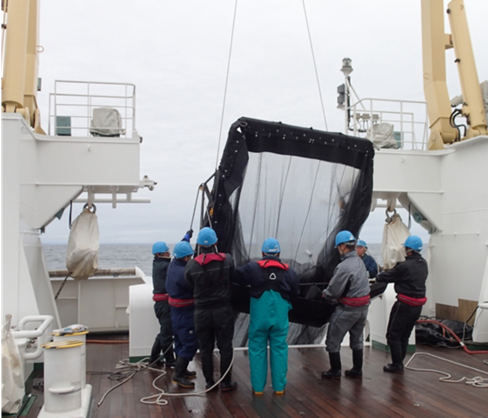
1)After the frame is lifted from the deck using the crane at the stern of the ship, the aft most part of the MOHT, the cod-end section, is dropped into the sea. Next, while moving the ship forward, the main wire is unloaded and fed into the sea up to the frame section.
2)The main wire is unrolled and the net is sunk to the target depth. When the net reaches the target depth, the main wire is stopped. The ship's speed is increased to the target speed and the net is towed for the desired length of time or distance.
3)When the tow is completed, the main wire is wound up and the MOHT is pulled up to the surface. The hoisting speed is slowed down and the net is gradually brought closer to the ship.
4)When the frame is just behind the ship, the stern crane lifts the frame up and onto the deck. Because MOHT nets are long, the rear part of the net is still underwater when the frame is lifted onto the deck. The long net is then hauled up, and the cod end is lifted out of the water. At this time, seawater is poured over the outside of the net with a hose at the same time as the MOHT is being lifted. This is done to collect samples that are stuck in the middle of the net or clogged in the nets. This process not only improves the quantitativeness of the sample collection, but also prevents the sample from being contaminated the next time the net is towed or the collection efficiency from being reduced due to the clogging of the net.
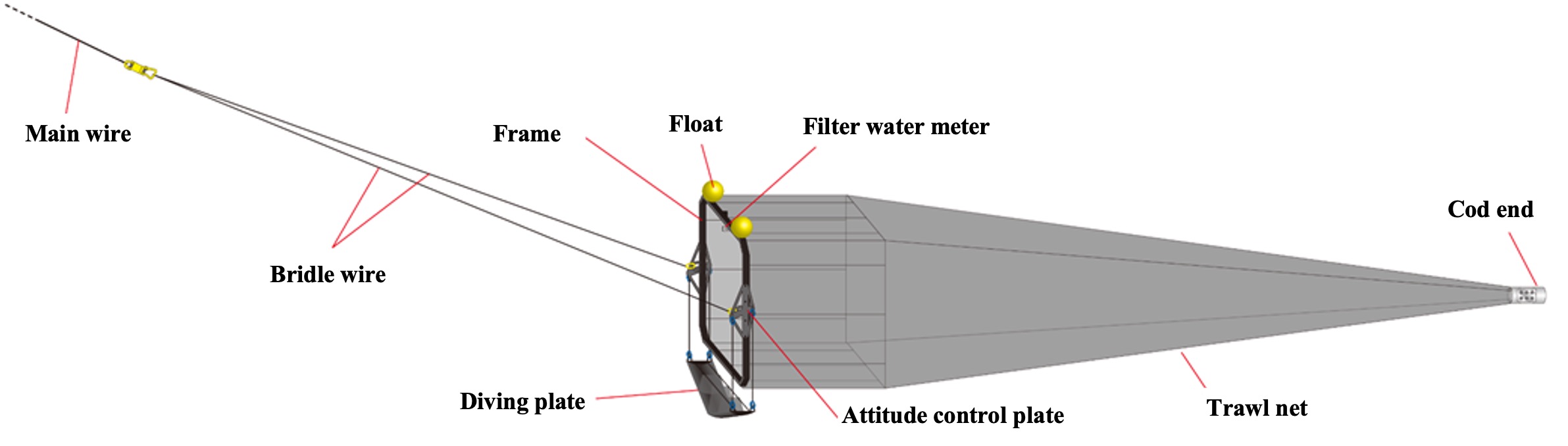
5)Once the bucket attached to the cod-end is lifted, the collected material in the bucket is transferred to another container to be used as a sample for investigation and research. The amount of seawater collected is estimated by reading the rotation speed of the filter water meter.
Despite the excellent depth stability of MOHT, the net depth can change during towing due to the resistance the unrolled wire rope receives in the water, the dead weight of the wire rope, and clogging of the net. The
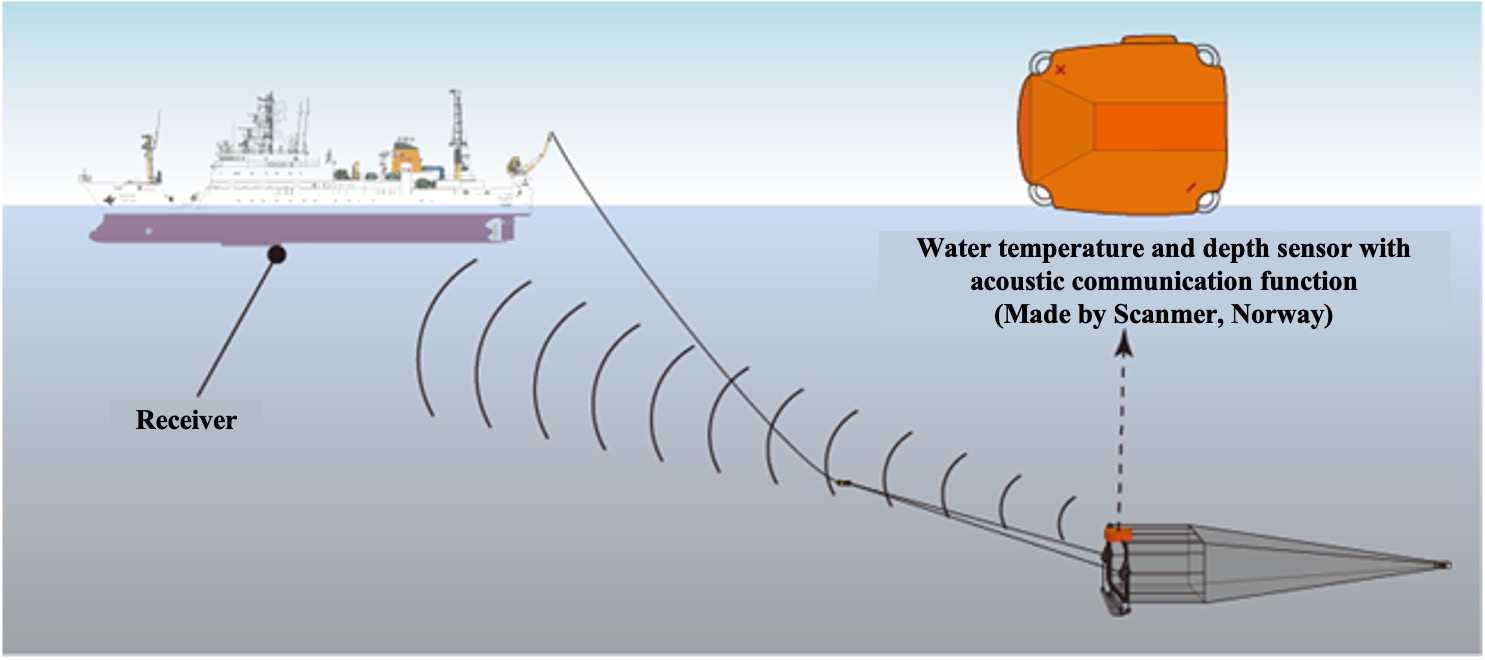
net depth can be determined from the tilt angle of the main wire, or the net depth can be monitored using a depth sensor with acoustic communication (Figure 4:
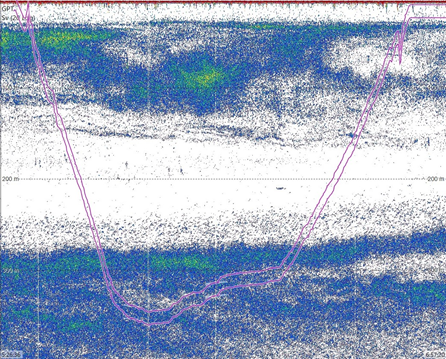
Fishing Gear Shape Measuring Device) and the length of the main wire adjusted if it deviates from the desired depth. Using a system that combines a fishing gear shape measuring device and
a quantitative echosounder it is possible to tow the net while matching the location of the biological community with the depth of the net on the echogram, as shown in Figure 5.