
Otter trawl
セクションアウトライン
-
Fishing nets pulled by a boat are called "boat seine." There are two types: "haul nets," in which the net is pulled by a stopped boat, and "trawl nets," in which the net is pulled over a long distance while the boat is moving forward. Among trawl nets, the one that uses an otter board (aperture board) to deploy the trawl net is called an otter trawl, and is a fishing tool and method widely used in Japan, the U.S., and Europe due to its excellent gathering efficiency. Otter trawls are also used as an effective sample collection method in fisheries resource surveys on fisheries research ships. This section describes the two types of otter trawls used on the Hokkaido University's Training Ship Oshoro-Maru, one for surface and the other for bottom trawling. Surface and bottom tows are used according to which part of the ocean (surface or bottom) is to be towed.
-

Figure 1 Otter trawl
オッターボート: otterboat トロール網: trawl 先袖浮子: Tip Sleeve Floaters フロントウェイト: frontweight
a) For bottom trawling: The resistance of the otter board spreads the net horizontally, allowing it to be towed over a wider area of the seafloor.
b) For surface and mid-water: By attaching floats or weights to the towline, the net opening can be widened vertically.
The size of the otter board in relation to the trawl net is shown larger than actual size.
-
-
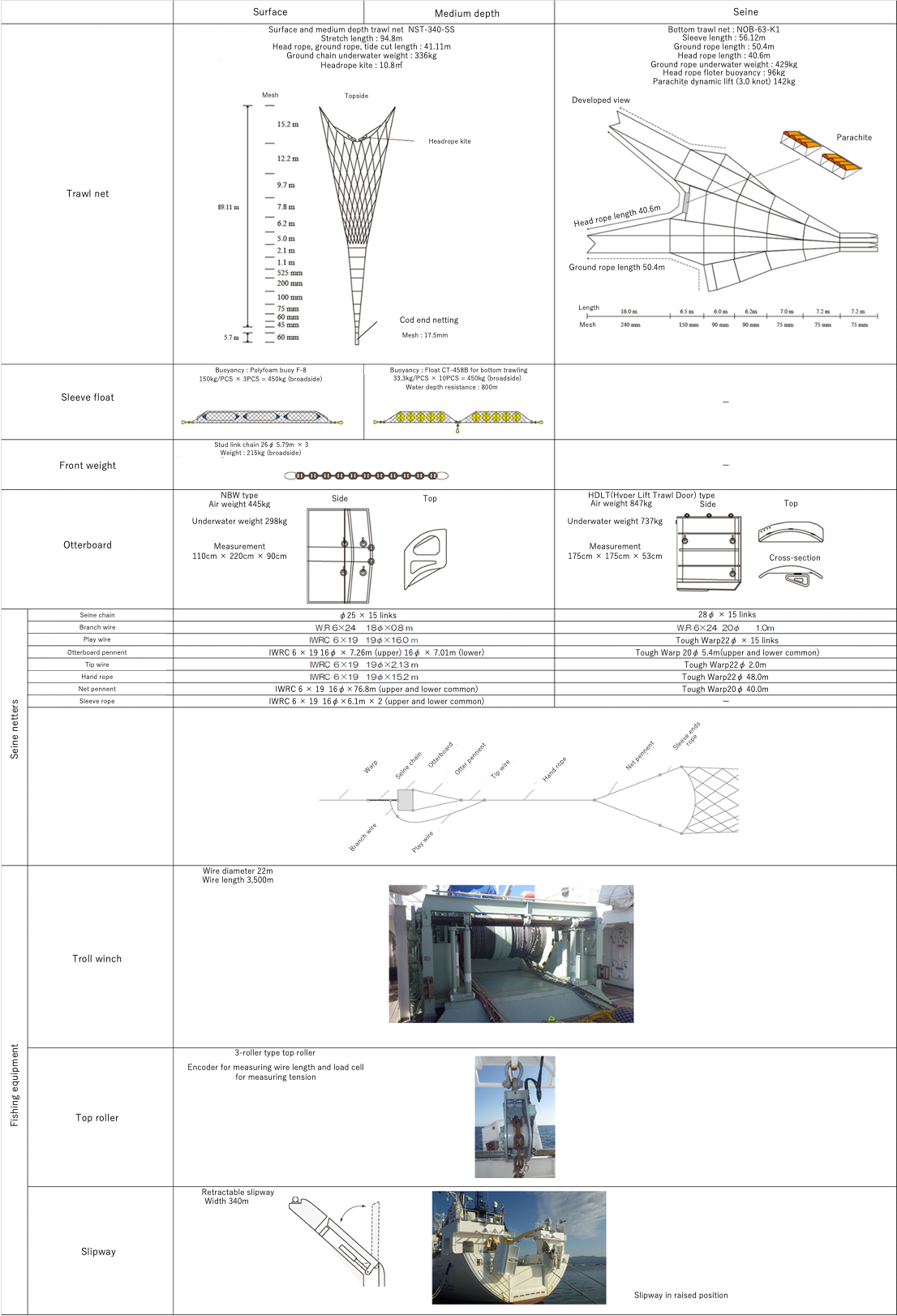
An otter trawl consists of a trawl net, an otter board, and wire ropes for towing them. Table 1 shows the configuration of the otter trawl for surface and bottom towing equipped on Oshoro-Maru. There is no major difference in the components of the trawl lines between surface and bottom trawls, but the lengths of the trawl lines are adjusted according to the different shapes of the trawl nets. In addition, wire ropes that are more difficult to break are used for trawls for bottom landing, as they are prone to high tension due to obstacles on the seafloor. A tip-sleeve rope is connected to the end of the sleeve net of the surface and mid-water trawl, and A float or weight is attached to it so that the opening of the net can be expanded vertically.
A trawl net consists of a "bag net," which is the main body of the net, and a "sleeve net," which is deployed from side to side in front of the net opening to drive nektons into the net. A float or kite (a structure that receives water currents and generates buoyancy) is built into the top (head rope) of the net mouth, and a metal chain is built into the bottom (ground rope) of the net mouth to serve as a weight, thereby expanding the net mouth in the vertical direction and increasing collection efficiency. The mesh of a bag net becomes finer from the net mouth to the tail, with the tail having an area for storing the catch. The tail section is called the cod-end, and when the size of the target species is small or there is a possibility that it may escape through the mesh, a bag of finer mesh mesh is inserted inside the cod-end. Insert a bag of finer minnow nets inside the cod-end.
The otter board is a sturdy metal plate with a curved cross-section, to which metal fittings are attached to connect the towline. The shape of the net is designed to take advantage of water resistance so that the distance between the left and right otter boards is open to enhance the net's unfolding action.-
Table 1 Composition of Otter Trolls
-
-
Otter trawling is a fishing gear and fishing method that is expected to produce a large catch, and the operation procedure is simple: (1) cast the net, (2) tow the net, and (3) retrieve the net, but the process is extensive and dangerous. Safe and efficient trawl operations can be achieved only through the cooperation of skilled on-site workers, winch operators, and boat operators. The following is a video showing the operation sequence and a video of the operation.
-

Figure 2 Cast netting operation (surface trawl)
-
①Casting net operation
First, the trawl net is cast into the sea through the slipway at the stern while the ship is moving forward. Next, the trawl winch is turned to unroll the towline that had been wound onto the drum (Figure 3). At this point, the otter board is still suspended from the top roller at the stern (Figure 4).

Figure 3 Casting net operation 1 (casting a net)
ハンドロープ・網ペンネント: Hand ropes and net pennents オッターペンネント ・先付ワイヤー :Otter pennent and Tipped wire トロールウィンチ: Troll winches トップローラー: Top roller オッターボード: Otter board
The trawl winch is wound with play wire, hand rope, net pennent, tailsleeve rope, and trawl net in this order. The trawl net is pulled out by turning the winch, and is then fed into the sea from the tail section. The otter pennent and tip-sleeve wire are preconnected to the otter board.

Fig. 4 Top roller
舌状ストッパー: tonguelike stoper オッターボード: otter board
The top roller serves not only as a pulley for warping, but also to secure the seine chain and suspend the otter board aft. There is a movable stopper that works like a check valve, and the seine chain cannot be unrolled unless the stopper is opened (orange: closed state, blue: open state). To release the stopper, the seine chain must be pulled at warp so that there is no load on the stopper.
A pre-tied wire is connected to the connection between the play wire and the hand rope, and the winch is further unloaded. Eventually, the otter pennent is tensioned and the play wire and warp are slackened (Figure 5).

Figure 5 Casting net operation 2 (connection of otter board and net)
ワープ: Warp 遊びワイヤー: Play wire
A three-link chain is incorporated at the connection (blue circle) between the hand rope (yellow wire) and the play wire (green wire), and the end of the tip wire (blue wire) is connected to the center link. As the winch is unrolled, the net falls backward and tension is applied to the otter pennent. The tension in the warp (black wire) is released so that the connection to the play wire (red circle) can be disconnected.
Once the tip of the warp has extended to the point where it reaches the seine chain, the winch is stopped and the play wire is disconnected. The tip of the warp is connected to the end of the towline, and the end of the play wire (so called because it is loose during the tow. In Japanese, the state in which a wire is loose is sometimes described as "playing"(日本語特有の表現だと思ったので補足説明を入れました)) is connected to the middle of the seine chain (Figure 6).

Figure 6 Casting net operation 3 (connection of otter board and warp)
ワープ: warp 曳網鎖: seine chain 枝ワイヤ: branch wire 遊びワイヤ: play wire
Connect the end of the warp to the end of the seine chain. The end of the play wire should be tethered to the middle of the seine chain via a branch wire.
Once the winch is wound in and the warp is tensioned, the top roller stopper is released. As soon as the stopper is released, the warp is immediately unrolled and the otter board is placed in the water (Fig. 7). Once the otter board is placed in the water, the warp continues to be unrolled until the net reaches the desired depth.

Figure 7 Casting net operation 4 (putting in the otter board)
外向きの揚力: outward lift 流速大: high flow velocity 流速小: low flow velocity
Once in the water, the outward lift force causes the left and right otter boards to separate. As the otter boards separate, the opening of the net widens laterally.
-
The trawl net is pulled onto the vessel by reeling the warp into the winch, and the otter board is detached from the towline in the reverse procedure to cast the net. The trawl net is pulled onto the ship by reeling the warp into the winch, and the otter board is detached from the seine in the reverse procedure to cast the net.

Figure 8 Cod end of trawl net
The tail of the trawl net is sewn shut with a rope. If the rope is untied with the tail suspended, the catch is swept out of the net.
-
-
To efficiently collect biological samples, it is important to know the depth of the net and the opening of the net mouth during the tow. By attaching underwater sensors with acoustic communication to the trawl net, the depth and shape of the net during operation can be monitored in real time (Figure 9). The sensor readings are converted into acoustic signals, which are received by an underwater microphone (hydrophone) located on the bottom of the ship. The received data is processed by the onboard controller and displayed on a monitor (Figure 10).

Figure 9 Underwater sensors and measurement items of the fishing gear shape measuring device
オッターボード深度: Otterboard depth ヘッドロープ深度: Headrope depth ヘッドロープ水温・傾斜: Headrope water temperature and inclination 網口高さ: Net mouth height ヘッドロープ- 海底間距離: Headrope to seabed distance
オッターボード間隔: Otterboard interval 網口縦断方向流速: Longitudinal current velocity at the net mouth 網口横断方向流速: Crossing current velocity at the net mouth 袖網感覚: Sleeve net sense
Oshoro-Maru is equipped with the following underwater sensors
【Combined depth, water temperature, and inclination sensor】
Attached to the headrope, it measures depth, inclination, and water temperature.
【Trawl speed sensor】
Attached to the headrope, it measures depth, attitude, and water temperature.
【Trawl Eye Sensor】
Attached to the headrope, this sensor acquires fish-finding images above and below the net. It also measures the distance from the headrope to the seafloor and to the groundrope.
Sleeve net interval sensor
A spacing sensor and transponder are attached to each side of the sleeve net to measure the distance between them (how open the sleeve net is).
【Otterboard interval sensor with depth recorder】
An interval sensor and transponder are attached to the left and right otterboards, respectively, to measure the distance between them (how open the otterboards are). The interval sensor and transponder also have a depth sensor built in to measure the depth of the otterboard as well.

Figure 10 Configuration of fishing gear shape measuring equipment
データ表示モニタ: Data display monitor 受信装置: Receiver 受波器: Transducer 水中センサ: Underwater sensor
The signal emitted by the underwater sensor propagates through the water toward the ship. When the transducer (hydrophone) receives the sound wave signal, the onboard receiver processes it and quantify it. The quantified measurement data is output in real time as numerical values and charts on a dedicated data display monitor.
Figure 11 Sonar dome
The transducer of the acoustic measurement equipment are located in a structure on the bottom of the ship called a sonar dome. The hydrophone of the fishing gear shape measuring equipment is located at the very back of the sonardome (circled area) to facilitate reception of sound wave signals from behind.
-
A equipment that uses ultrasonic waves to locate fish in the sea is called a fish finder. If we can use a fish finder to determine the location of a school of fish while towing the net at that location, we can collect samples efficiently. In addition, in order to tow the trawl net over the seafloor surface more reliably and safely, the depth of the research area and the undulations of the seafloor must be captured in detail with an echo-sounder.

Figure 12 Acoustic measurement equipment used for fisheries surveys
a) Scanning sonar: Transmits ultrasonic waves around the entire area and captures the reflected waves from the sea to detect schools of fish in an area. The detection range can be adjusted by changing the angle of the sonic beam (depression angle). b) Quantitative echo sounder: A quantitative echo sounder measures and records the strength and number of sound waves (echoes) returned from a school of fish to enable quantitative evaluation of the characteristics of the fish school. The measurement results from a quantitive echo sounder are output as an image "echogram," which is a color-coded display of the depth from which the echoes returned and the intensity of the reflections. c) Multi-narrow-beam bathymetry: Measures water depth over a wide area by transmitting multiple highly directional sonic beams in a fan shape. It is also called a seafloor topography survey equipment because it can depict the undulations of the seafloor in three dimensions.

