
材料と方法
Perfilado de sección
-
-

表1. 試験魚のパラメータ
-
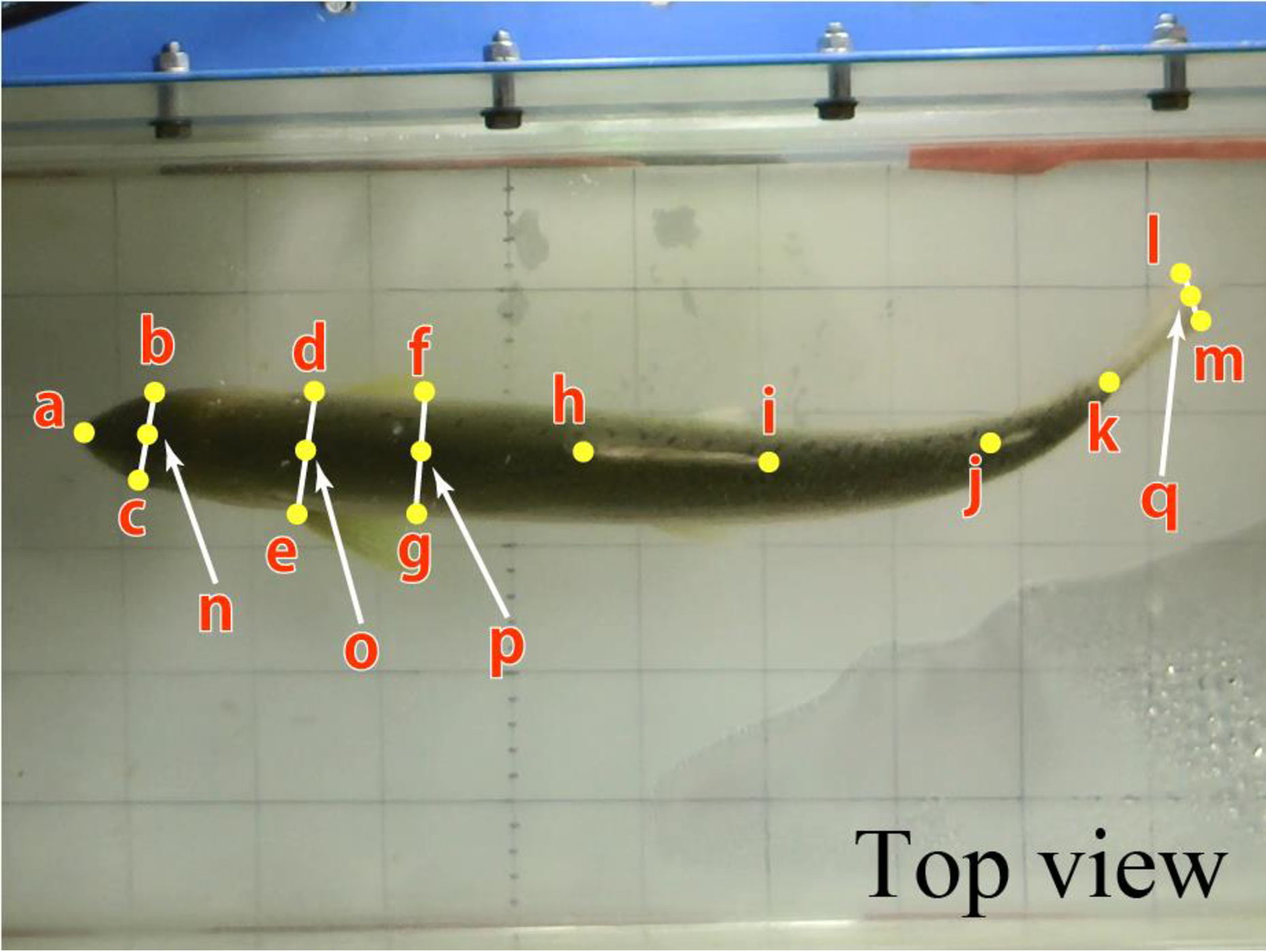
図1. 体軸上の点
-
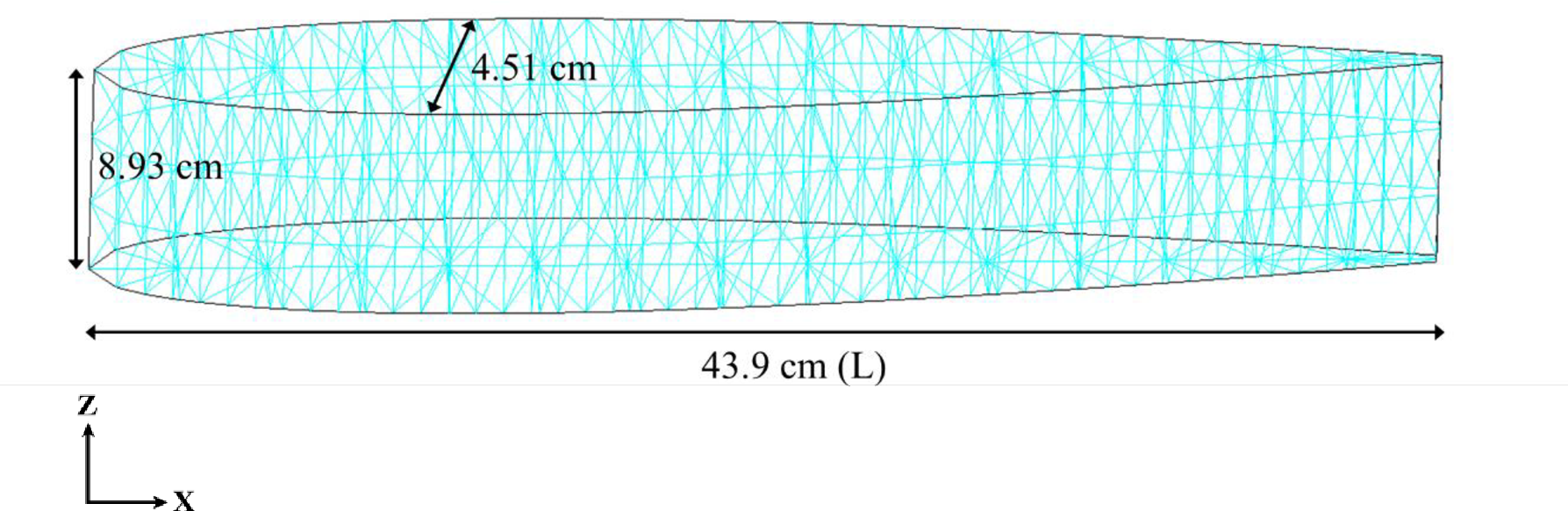
図2. CFD解析に使用したモデル
-
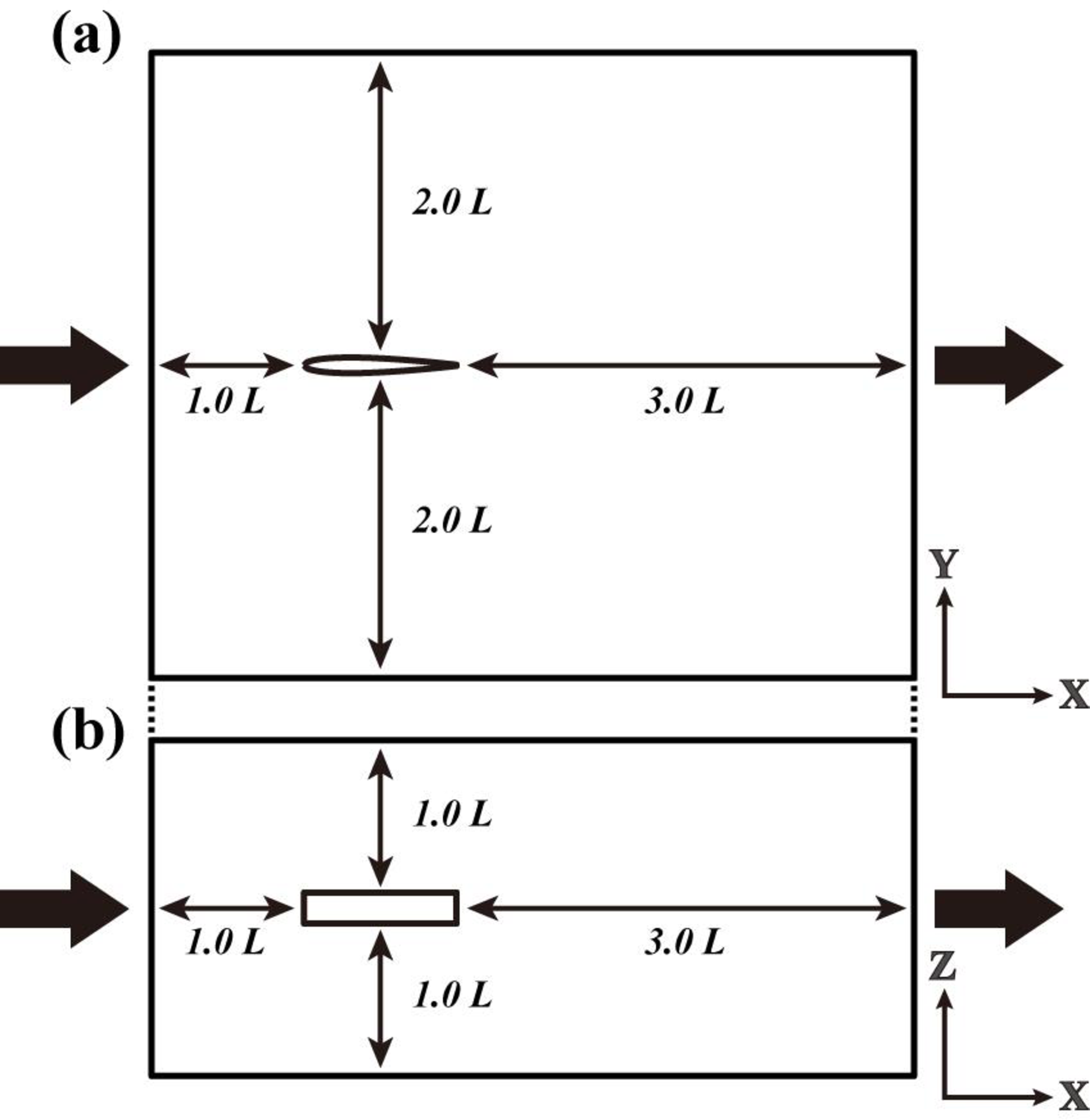
図3. ソリタリースイミングの CFD 解析のための解析領域。(a) 上面図、(b) 側面図。
-
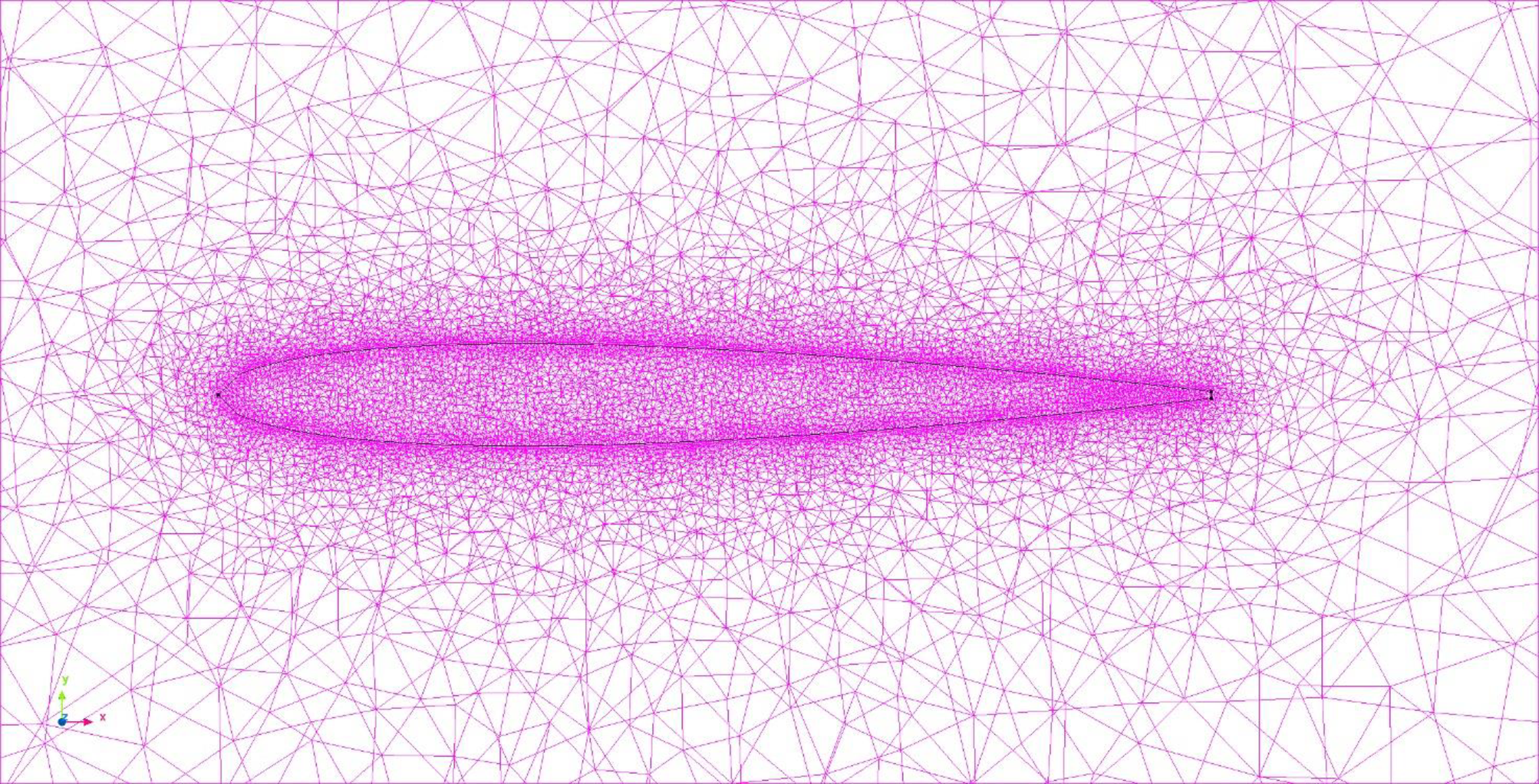
図4. 孤立遊泳の CFD 解析におけるメッシュ分割
-
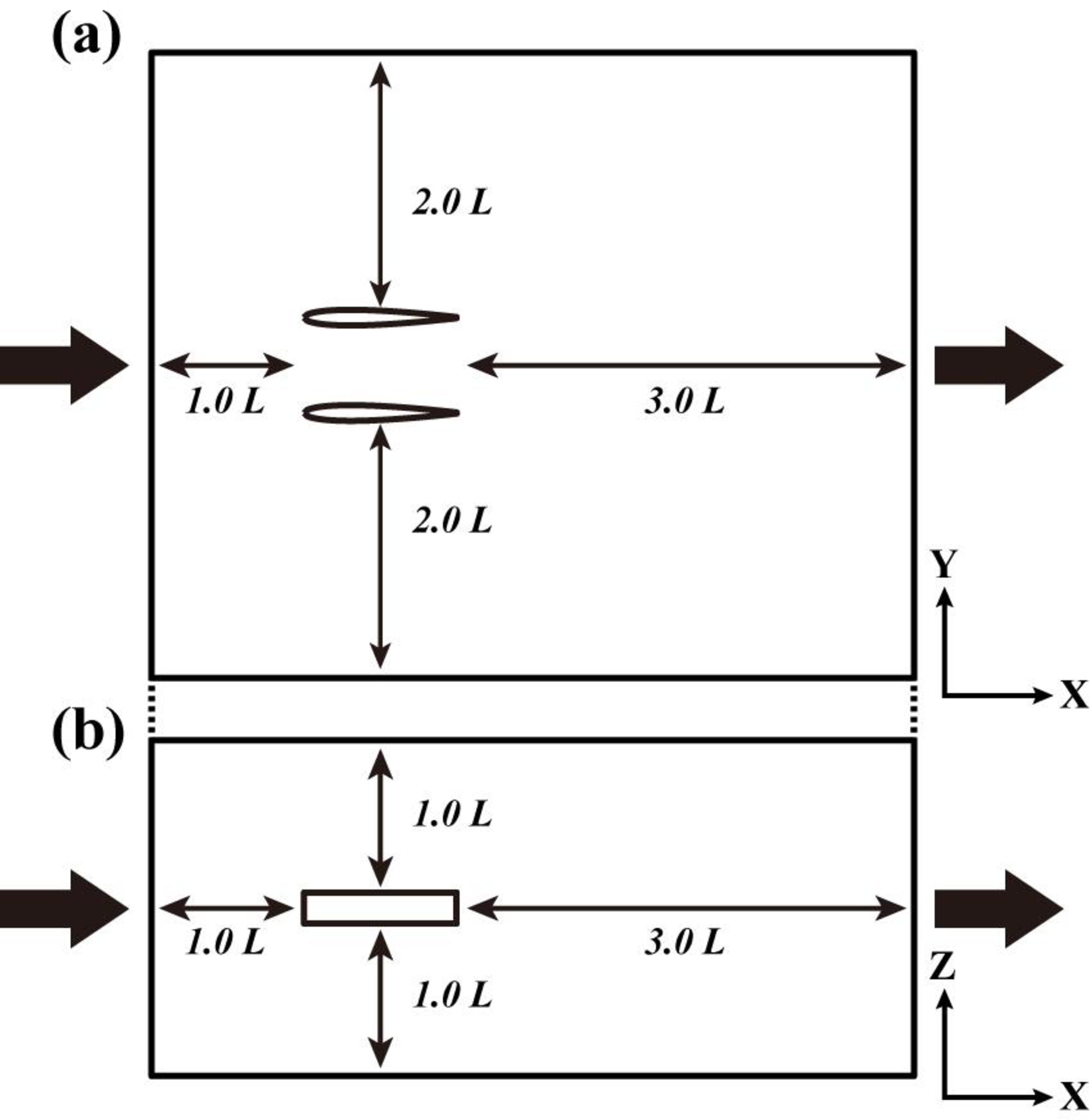
図5.パラレルスイミングのCFD解析のための解析領域。(a) 平面図,(b) 側面図。
-
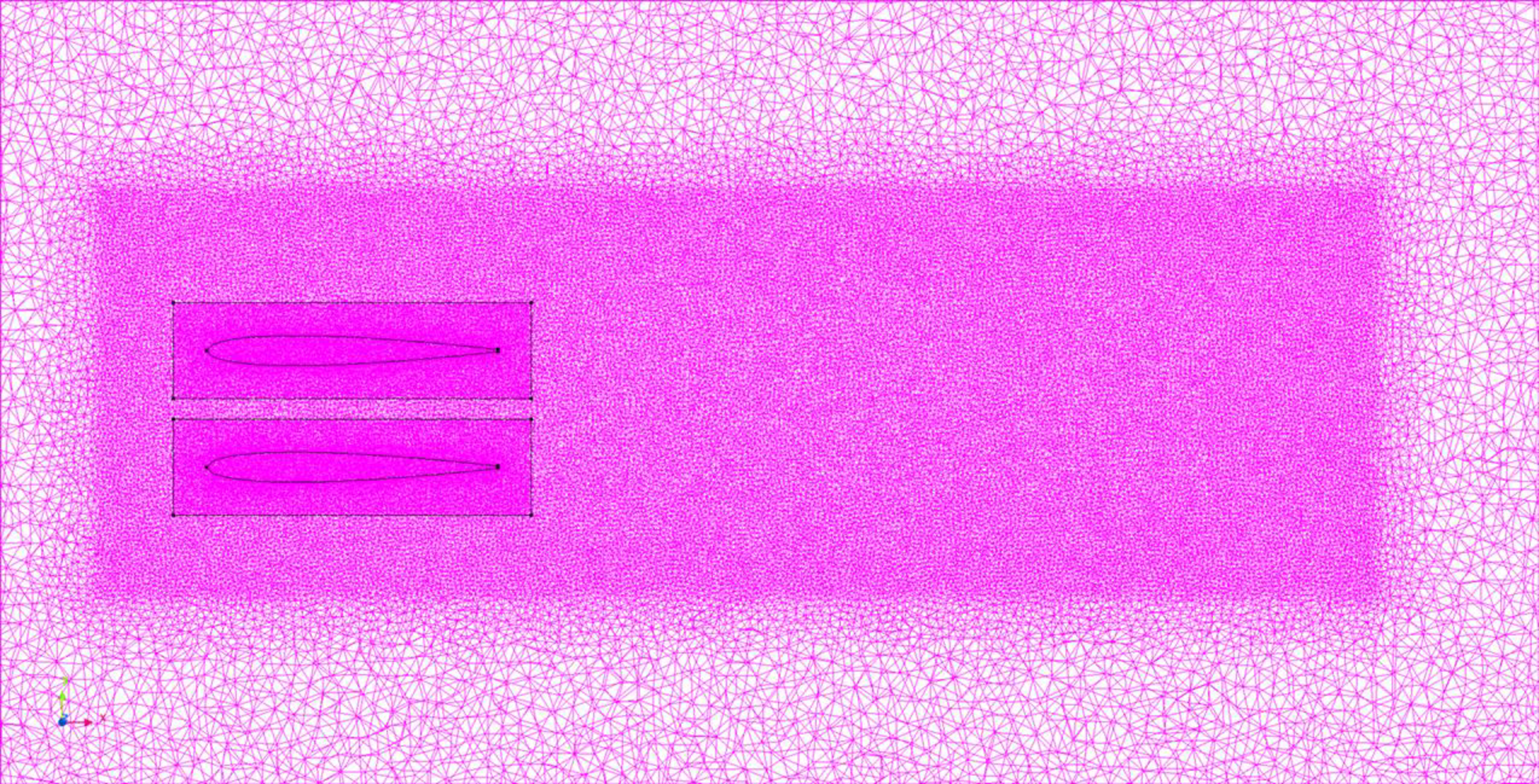
図6. パラレルスイミングのCFD解析におけるメッシュ分割
-
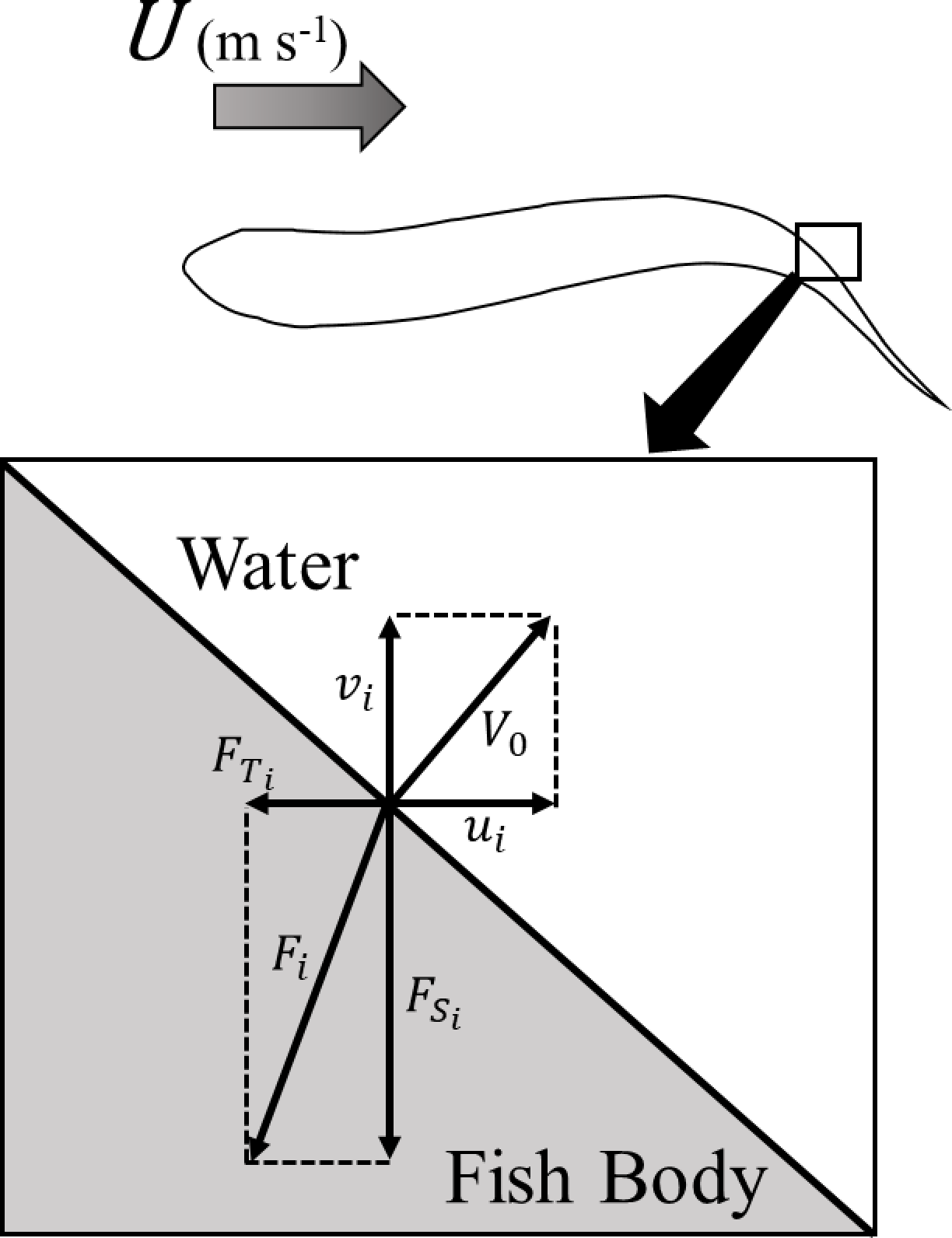
図7. 魚体表面の要素にかかる力Fiの分解
Uは流入流速、V0は要素の速度、uiは要素の進行方向速度、viは要素の横方向速度、FTiは要素に作用する推力、FSiは要素に作用する横力である。