
(3)採泥される機構
Garis besar topik
-
-
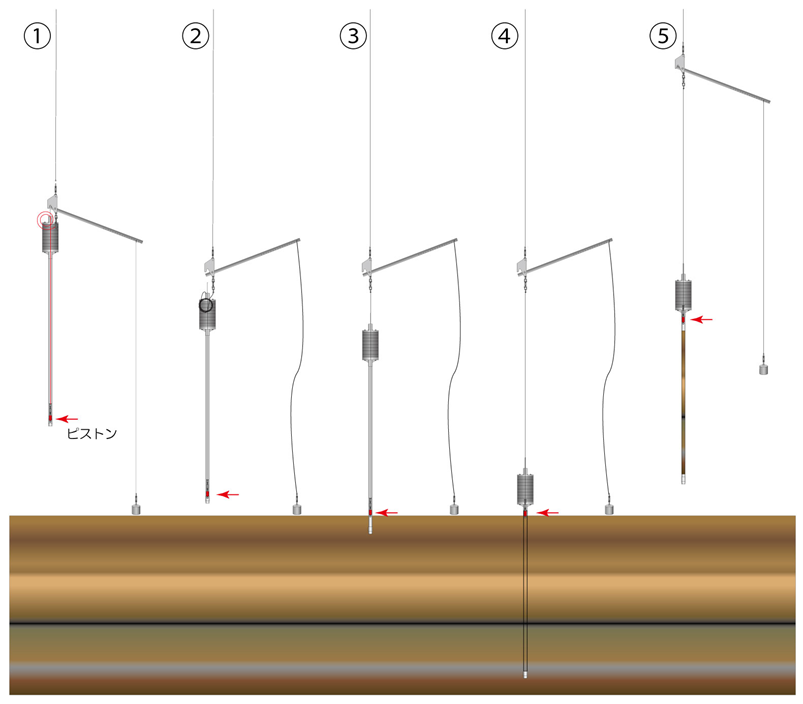
図7 ピストンコアラーの動作①
-
図8 ピストンコアラーの動作②
-
図9 ピストンコアラーとグラビティコアラーの比較
a) グラビティコアラー b)ピストンコアラー